
Biomimicry of fish lateral line for future robots and submarines
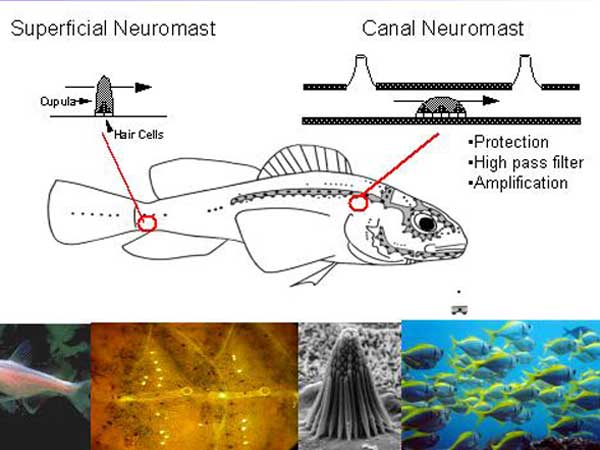 The lateral line is a hydrodynamic imaging system found in fish and aquatic amphibians enables them to accomplish a variety of underwater activities such as localization of moving prey or predators, detection of stationary objects, schooling without colliding and social communication. It consists of numerous hair cell sensors called neuromasts which are distributed all over the fish body, with many of them situated on the surface of the skin and others in sub-epidermal canals. Researchers in Illinois have created an artificial lateral line that could someday be used to keep man-made submersibles out of harm’s way.
The lateral line is a hydrodynamic imaging system found in fish and aquatic amphibians enables them to accomplish a variety of underwater activities such as localization of moving prey or predators, detection of stationary objects, schooling without colliding and social communication. It consists of numerous hair cell sensors called neuromasts which are distributed all over the fish body, with many of them situated on the surface of the skin and others in sub-epidermal canals. Researchers in Illinois have created an artificial lateral line that could someday be used to keep man-made submersibles out of harm’s way.
Developed by Douglas Jones, from the University of Illinois, along with Chang Liu from Northwestern University, the artificial lateral line (ALL) consists of a 3-D system of biomimetic neuromasts (BNs) wrapped around a cylinder. Each individual BN consists of a horizontal cantilever with a 500 μm tall vertical hair attached at the distal end. In comparison, the cupulae of fish lateral line neuromasts range in height from about 20 μm to at least 500 μm, depending on the species. At the fixed end of the horizontal cantilever, a piezoresistor is embedded by selective doping of silicon material.

Flow moves the vertical hair and therefore creates a bending torque which acts on the horizontal cantilever which presses the piezoresistor and changes its resistance. The change of the resistance is used to assume the local flow velocity. Along the dominant axis, the sensor responds to flow in both directions with equal sensitivity but opposite polarity.
Fifteen BNs were used to make the ALL for their present study. A PVC pipe with outer diameter of 89mm was used to mimic the fish body. Among the 15 BNs, 9 were along the axis of the pipe with linear spacing of 30mm, and 7 were along the cross section of the pipe with angular spacing of 30° (corresponding to an arc length of 23mm). The two orthogonal arrays crossed each other at the middle where they shared a BN.

In one of their experiments, they placed a live crayfish in the pool where AAL array was submerged. Since the sensors are placed in relation to one another, and different ones would register the crayfish’s movements at different times, the array is able to detect the direction of the fish.
A man-made lateral-line system can be indispensable for underwater vehicles and robots, enabling new methods of exploration, interaction and communication. For more information about their research you can read the paper they published (PDF).








Leave your response!