Quadrotor robots throw, catch and balance inverted pendulum
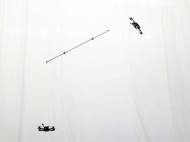 A student at the Swiss Federal Institute of Technology (ETH) Zurich developed an algorithm which enables two quadrotors to balance an inverted pendulum and juggle it among each other. In order to achieve this stunt, the researchers had to set theoretical models of the process, and engineer the complete system of balancing, throwing, catching, and… »
A student at the Swiss Federal Institute of Technology (ETH) Zurich developed an algorithm which enables two quadrotors to balance an inverted pendulum and juggle it among each other. In order to achieve this stunt, the researchers had to set theoretical models of the process, and engineer the complete system of balancing, throwing, catching, and… »