
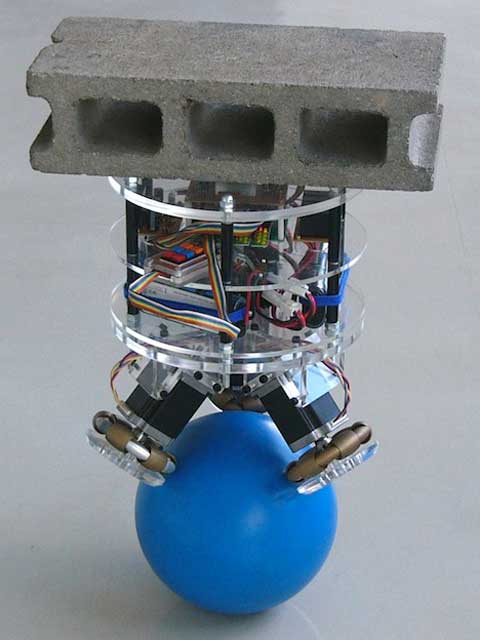
BallIP robot is able to balance on a ball while it carries weight
 Dr. Masaaki Kumagai, director of the Robot Development Engineering Laboratory at Tohoku Gakuin University, in Tagajo City, Japan, and his student Takaya Ochiai have built a robot named BallIP (Ball Inverted Pendulum) that is able to balance on a ball. Such a ball-balancing design is like an inverted pendulum, and thus naturally unstable, but it offers advantages since it has a small footprint and can move in any direction without changing its orientation.
Dr. Masaaki Kumagai, director of the Robot Development Engineering Laboratory at Tohoku Gakuin University, in Tagajo City, Japan, and his student Takaya Ochiai have built a robot named BallIP (Ball Inverted Pendulum) that is able to balance on a ball. Such a ball-balancing design is like an inverted pendulum, and thus naturally unstable, but it offers advantages since it has a small footprint and can move in any direction without changing its orientation.
The robot is about half meter high (1.64 feet) and weighs 7.5 kg (16.5 punds). The ball on which it balances is a 3.6-kg (8 pounds) bowling ball with a 20 centimeter diameter (almost 8 inches) and coated with rubber spray. The rubber-coated bowling ball is driven by three omnidirectional wheels developed at Japan’s R&D institute RIKEN. The wheels enable the robot not only to stand still but also move in any direction and pivot around its vertical axis.
To power the wheels, they chose NIDEC motors and micro-step controllers to achieve a rate of 0.225 degree per step, which made the rotation of the wheels smooth. The robot’s control system runs on a 16-bit microcontroller, which receives data from two sets of Analog Devices gyroscopes and accelerometers. The gyros are used to detect fast movements, or high-frequency components, as well as to help the accelerometers detect the inclination which is affected by the motion of the robot.
The control strategy is the same used for other inverted pendulum-type systems. The goal of the control system is to keep the inclination at zero degrees and keep the ball on the same spot. If you push the robot, it will try to balance itself and return to the original location.
The robot has two control modes. The first tries to keep the robot stable and on the same spot, as described above. The other is a passive mode, in which the robot remains stable but you can easily push it around, even using just a finger.
Dr. Kumagai plans to make the robot more user-friendly and able to perform tasks as carrying things or working in cooperative mode where several of them would work together to carry larger and heavier loads. He already built three robots which are able to carry a weight of 10-kilogram bricks, and used them to demonstrate the cooperative capabilities where he managed to make them work together in order to carry a large wooden frame.








Easy movement and omni directional are features of this design. Wonderful. Congratulations.
Dr.A.Jagadeesh Nellore (AP), India