
Baseball robot shows high-speed dexterity
 A robotic system which acts as a baseball pitcher and batter was made by Masatoshi Ishikawa from Tokyo University (Science Information System). Robot pitcher to throw a strike, about 9 percent of the time, the robot until the batter into the strike zone the ball, that hittable. It was made in order to demonstrate the latest advances in high-speed industrial robot technology in a fun way. They used a strategy focused on the superposition of wave patterns.
A robotic system which acts as a baseball pitcher and batter was made by Masatoshi Ishikawa from Tokyo University (Science Information System). Robot pitcher to throw a strike, about 9 percent of the time, the robot until the batter into the strike zone the ball, that hittable. It was made in order to demonstrate the latest advances in high-speed industrial robot technology in a fun way. They used a strategy focused on the superposition of wave patterns.
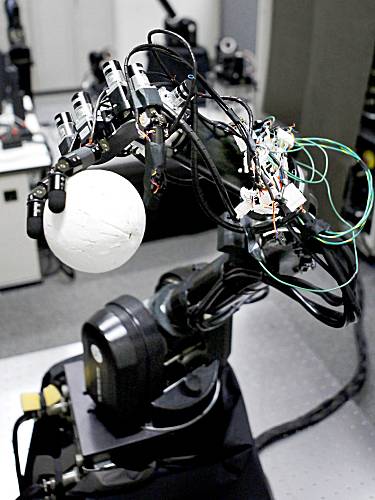
The robot pitcher consists of a high-speed, three-fingered hand mounted on a mechanical arm (developed at the MIT). With superb control of nimble fingers that can open and close at a rate of up to 10 times per second, the robot can release the ball with perfect timing. Precise coordination between the fingers, hand and arm allow the robot pitcher to hit the strike zone 90% of the time.
Batting motion using a high-speed arm and a high-speed stereo vision is represented. In the algorithm, in order to achieve both rapidity of swing and accuracy of hitting, a hybrid trajectory generator of both visual information and time variable is proposed and it is compensated by visual feedback in real time. As a result, under a severe condition that such as when the manipulator must immediately start to swing 0.1s after the vision sensor recognized the ball, the manipulator can hit the ball near the core of the bat by high-speed visual feedback.
In their presentation, the researchers placed the robot pitcher 3.5m away from the mechanical batter. The pitcher’s 40km/h sidearm throws posed little challenge to the batter, whose 1000-frame-per-second camera eyes allow it to see the ball in super slow motion as it approaches. The robot batter has a near-perfect batting average when swinging at pitches in the strike zone.

In the presentation, a 3D shape recognition algorithm uses a high-speed vision and an active lightning device. The algorithm produces an elliptical shading pattern by giving strong point light to a target. Using a high-speed vision the moment parameters of the shading pattern is observed at a rate of 1 kHz, and the target surface is reconstructed from the moment parameters.
To make future contests more interesting, the researchers plan to increase the robot pitcher’s throwing speed to 150km/h and teach it to throw breaking balls and change-ups. In addition, they plan to train the robot batter to repeatedly hit balls to the same target.
They also focus on the research related to robots that collaborate with humans. In their research, they propose a collision avoidance system in which high-speed camera heads are placed on the robot’s manipulator in order to increase human safety.








Leave your response!