
High-precision robots modularized and available in kit form
 A doctoral student from EPFL’s Laboratory of Robotics Systems has developed a concept for modular industrial robots, based on the technology of parallel robots, whose precision is expressed in nanometers. Its developer named it Legolas, due to association to the precise elf of the same name from The Lord of the Rings, and due to its modularity which resembles Lego bricks.
A doctoral student from EPFL’s Laboratory of Robotics Systems has developed a concept for modular industrial robots, based on the technology of parallel robots, whose precision is expressed in nanometers. Its developer named it Legolas, due to association to the precise elf of the same name from The Lord of the Rings, and due to its modularity which resembles Lego bricks.
Developed by Murielle Richard, from the Laboratory of Robotics Systems (LSRO) at EPFL, the robot is designed for industrial applications where it would be capable to suite various needs of its users, and have a variable number of degrees of freedom to match the complexity of the needed task.
“Normally, the development time required for a high-precision robot is long – around two to three years – and expensive. For industry, for example in watchmaking, this is too long”, said Richard.
To shorten the time required, she has conceived a modular system that has a very limited number of modules (active or passive) whose combinations enable the creation of a large number of robots of different types.
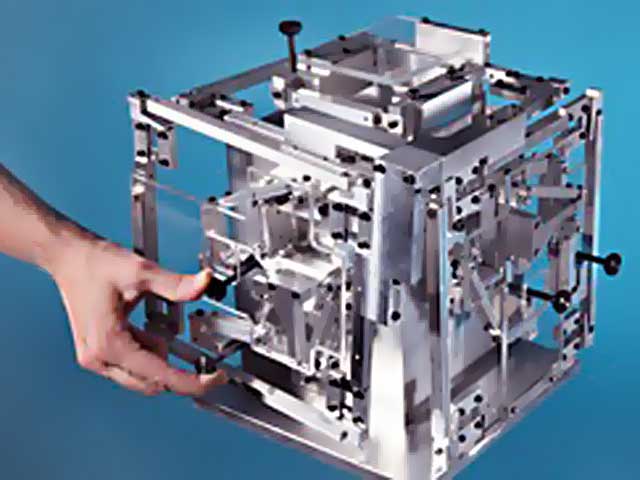
In practice, “plates” equipped with motors that provide one to three degrees of freedom are mounted on a cube which is 10 cm (4 inches) wide. According to their type and disposition, they can allow up to six degrees of freedom (three translational and three for rotation) to a point situated at one of the angles of the cube, on which a tool can be fitted.
The assembly of these different “plates” results in a “parallel”-type robot. This principle has already been used by the Director of the laboratory, Reymond Clavel, in the invention of the well-known “Delta robot”, which is used mainly in the packaging industry. The fact that several arms link the “output” (or end-effector, the part that moves and holds a tool) of the robot to its fixed part gives this type of device greater precision, just like when we use both our arms to move an object, instead of just one. Moreover, these structures allow for very high acceleration.
In her research, Murielle Richard uses the mechanical properties of flexible parallel structures. Each of the “plates” of the robot is composed of parallel elements linked together by very fine metal bands. These plates are made from one piece, carved in a block of metal using a high-precision method of electrical discharge machining. Thus, they are able to generate, in each direction, movements that can be combined and controlled with extremely high precision.
Precision of the order of five nanometers (millionths of millimeters) in a modular device that is quickly adaptable to specific needs shows great potential in industry such as fine watchmaking, optics and microtechnology.
For more information, you can read the article named: “Concept of modular flexure-based mechanisms for ultra-high precision robot design” (PDF).








Leave your response!