
Kojiro – light and agile musculoskeletal humanoid robot
 Kojiro is an advanced musculoskeletal humanoid robot under development at the University of Tokyo’s JSK Robotics Laboratory. Kojiro’s creators designed its body to mimic the way our skeleton, muscles, and tendons work to generate motion. The goal is to build robots that are light and agile, capable of moving around and interacting with the physical world in the same way our flesh bodies do.
Kojiro is an advanced musculoskeletal humanoid robot under development at the University of Tokyo’s JSK Robotics Laboratory. Kojiro’s creators designed its body to mimic the way our skeleton, muscles, and tendons work to generate motion. The goal is to build robots that are light and agile, capable of moving around and interacting with the physical world in the same way our flesh bodies do.
Masayuki Inaba, a professor at Tokyo University, and Yuto Nakanishi, a researcher and one of Kojiro’s main developers, showed me their latest trick: using a PS2 controller to make Kojiro move. In particular, they wanted to demo the robot’s spine motion. Unlike most of the other humanoid robots, Kojiro features a flexible spine, one of its main innovations. Like the human spine, Kojiro’s can bend in different directions to let the robot arch and twist its torso.
Nakanishi explained that most humanoid robots have articulated limbs and torsos powered by DC motors at the joints. Although these robots have a good range of motion, they’re typically hard and heavy, making collisions with humans and objects a big problem.
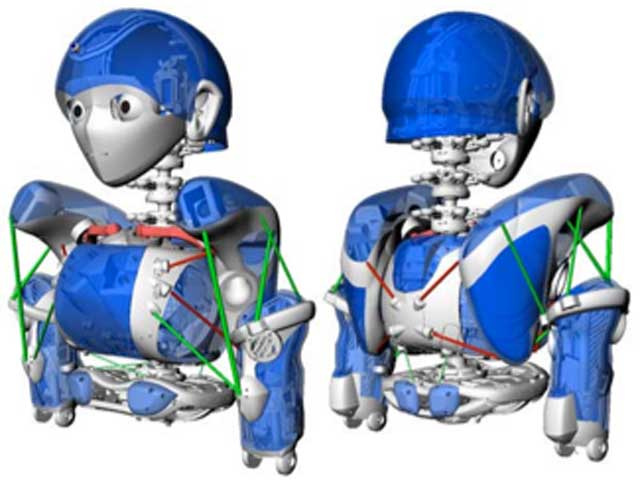
Kojiro does use DC motors, but the motors pull cables attached to specific locations on the body, simulating how our muscles and tendons contract and relax. The Kojiro has about 100 of tendon-muscle structures which work together in order to give the robot 60 degrees of freedom (much more than could be achieved with motorized rotary joints). And instead of big, bulky DC motors, Kojiro uses lightweight, high-performance ones. Its brushless motors are quite small and measure 16 millimeters (0.6 inches) in diameter and 66.4 mm (2.5 inches) in length. However, they can deliver a substantial 40 watts of output power.

Each motor unit has a rotary encoder, tension sensor, and current and temperature sensing circuit. A driver circuit board automatically adjusts the current fed to the motors based on temperature measurements. The results are transmitted to a computer and displayed on a control screen developed by Takanishi.
To make the robot safer, the researchers built its body using mostly light and flexible materials. To keep track of its posture and limb positions, they embedded joint angle sensors on spherical joints and six-axis force sensors on the ankles. For balance, the robot uses three gyros and a three-axis accelerometer on its head.
The main drawback of using a musculoskeletal system is that controlling the robot’s body is difficult. This kind of system has lots of nonlinearities and is hard to model precisely. To develop control algorithms for Kojiro, the JSK team is using an iterative learning process. They first attempt small moves and little by little tweak the control parameters until the robot can handle more complex movements.








Leave your response!