
Silkmoth controls a robotic exoskeleton to track down smells
 A group of researchers at the University of Tokyo attached a male silkmoth to a free-moving polystyrene ball that can control the movement of a small, two-wheeled robot. According to researchers, the findings will be used to devise better smell tracking algorithms by providing useful suggestions for the application of an insect behavioral model to autonomous systems.
A group of researchers at the University of Tokyo attached a male silkmoth to a free-moving polystyrene ball that can control the movement of a small, two-wheeled robot. According to researchers, the findings will be used to devise better smell tracking algorithms by providing useful suggestions for the application of an insect behavioral model to autonomous systems.
“The simple and robust odor tracking behavior of the silkmoth allows us to analyze its neural mechanisms from the level of a single neuron to the moth’s overall behavior. By creating an ‘artificial brain’ based on the knowledge of the silkmoth’s individual neurons and tracking behavior, we hope to implement it into a mobile robot that will be equal to the insect-controlled robot developed in this study”, said Dr Noriyasu Ando.
So, how did they achieve thus? Instead tracking any smell, the researchers used a sex pheromone given off by a female silkmoth. Once the male silkmoth is stimulated by the pheromone it exhibits a distinctive walking pattern – straight-line and zigzagged walking consisting of several turns followed by a loop of more than 360°. This routine the moth does to court its mate surely can’t be that efficient when applied in robotics, but let’s carry on with the story.
Why moths you ask? If you didn’t know, the antennae of many male moths are feathered in order to increase their surface area and make them more sensitive. The amount of pheromones female moths produce is minute, and it quickly becomes diluted out in the open air. Nevertheless, Saturnia pavonia (Emperor moth) male can often track a scent that is up to eight kilometers (five miles) away. Moth antennae already served as inspiration for better explosives detectors and for better nanospores which can be used to analyze molecules or proteins.
Since tested silkmoths couldn’t flap their wings, the researchers installed two 4-centimeter (1.57-inch) fans at the front of the robot to divert the pheromone-containing air to the moth antennae. It was tested in a small wind tunnel where pheromone and robot were placed at opposite ends. Fourteen silk moths were used in the study and all of them were able to successfully guide the robot towards the source.
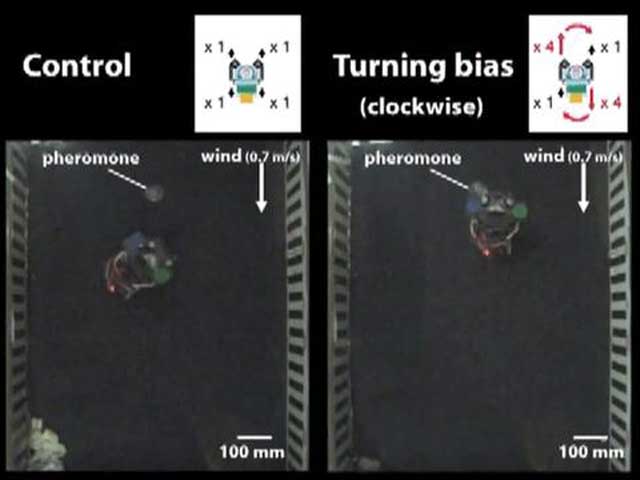
Another part of the research was when they changed the power of one of the robot’s two motors in order to swerve it to one side when moving (turning bias). Researchers claim it was used to test the adaptability of silkmoths in such situations, and that positive chemotaxis due to the bilateral olfactory input and opto-motor response would be able to compensate for turning bias.
According to their findings, the delay experiment suggested the limit of the time delay in the motor response, which can be considered as a requirement for the application of the silkmoth-behavior model to an odor-tracking robot. A time delay limit of 400 ms, which is comparable to the processing time of the sensor outputs for controlling motors, would not prevent the development of an artificial odor-tracking robot if a simple behavioral model is used. However, current chemical sensors are able to provide a fast response but a slow recovery time of 10 seconds. In comparison, neuronal activities of olfactory receptors indicated a recovery time shorter than one second.
“Our results will be an important indication for the selection of sensors and models when we apply the insect sensory-motor system to artificial systems”, said Dr Ando.
For more information, you can read the article published in the Bioinspiration and Biomimetics: “Odor-tracking capability of a silkmoth driving a mobile robot with turning bias and time delay” [2.66MB PDF].








Leave your response!