
Transparent stretchable sensor used to create touch-sensitive artificial skin
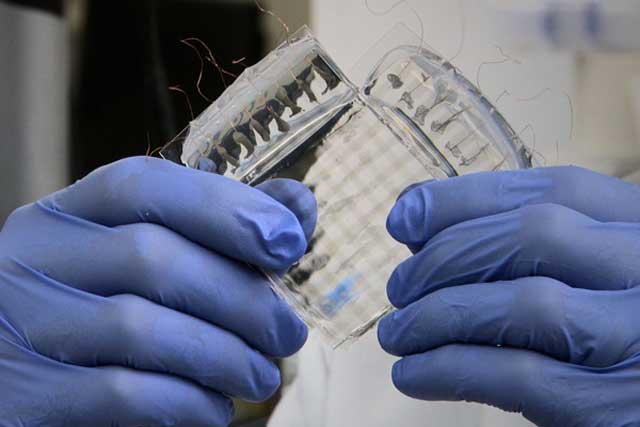 Stanford researchers have developed a stretchable, transparent skin-like sensor that can be stretched to more than twice of its original length and return to its original shape. It can sense pressure from a firm pinch to thousands of pounds. The sensor could be used in used in medicine as pressure-sensitive bandages or sensors on prosthetic limbs, robotics and touch-sensitive computer displays.
Stanford researchers have developed a stretchable, transparent skin-like sensor that can be stretched to more than twice of its original length and return to its original shape. It can sense pressure from a firm pinch to thousands of pounds. The sensor could be used in used in medicine as pressure-sensitive bandages or sensors on prosthetic limbs, robotics and touch-sensitive computer displays.
Developed by Zhenan Bao, associate professor of chemical engineering at Stanford University who also developed a more sensitive touch-sensitive rubber skin, the sensor uses a transparent film of single-walled carbon nanotubes that act as tiny springs, enabling the sensor to accurately measure the force on it, whether it’s being pulled like taffy or squeezed like a sponge.
“We did not spend very much time trying to optimize the sensitivity aspect on this sensor”, said Bao. “But the previous concept can be applied here. We just need to make some modifications to the surface of the electrode so that we can have that same sensitivity.”
The new sensor is a transparent film with carbon nano-springs. Carbon nano-springs are made when nanotubes in a liquid suspension are sprayed onto a thin layer of silicone, which is then stretched. When the silicone is stretched, some groups of nonotubes are stretched into the alignment with force. The material is then stretched in perpendicular nanotube-coated silicone in the direction perpendicular (normal) to the first direction, causes some of the nanotube groups to align in the other direction. When the silicone is released, it returns to its original dimensions while the nanotubes buckle and form little nanostructures that look like springs.
According to researchers from Bao Group, repeated stretching below the length of the initial stretch doesn’t make a significant change to the electrical conductivity. Maintaining the same conductivity in both the stretched and unstretched forms is important because the sensors detect and measure the force being applied to them through these spring-like nanostructures, which serve as electrodes.
Two layers of the nanotube-coated silicone, oriented so that the coatings are face-to-face, are put around a layer of a more easily deformed type of silicone which stores electrical charge. When pressure is applied on the sensor, the middle layer of silicone compresses, which alters the amount of electrical charge it can store. That change is detected by the two films of carbon nanotubes.
Whether the sensor is being compressed or extended, the two nanofilms are brought closer together, and the difference in the pattern of pressure are used to determine which kind of force is applied. For example, compression leads to a bull’s-eye pattern, with the greatest deformation at the center and decreasing deformation as you go farther from the center.
For more information, read the paper published in the journal Nature Nanotechnology named: “Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes”.








This will be very useful in robotics, where a fine-grained sense of touch in a durable ‘skin’ has been sought for many years.
It could enable robots to rely less on geometric accuracy of placement and rely more on near-enough bump/feel into place type of handling (like humans). Not to mention knowing how much force to apply.